

RAD Lab Projects
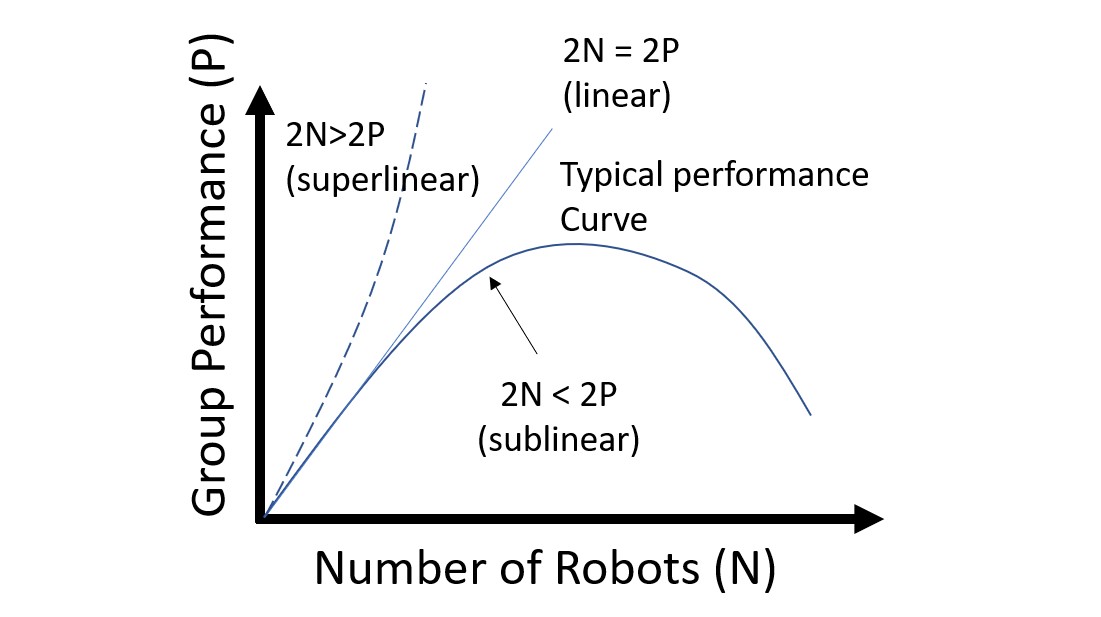
Robot Swarm Superlinear Performance
In general, doubling the number of robots in a group does not double the performance of the system. This project explores the specific circumstances or instances when doubling the number of robots more than doubles the performance, i.e. a superlinear increase.
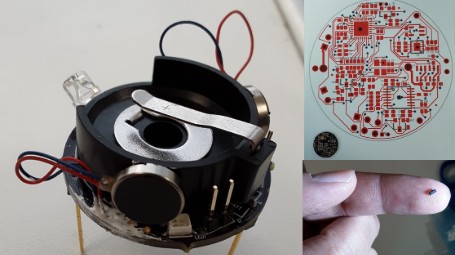
Robot Swarm Platform Manufacturing
The promise of swarm robotics is that swarms can be massively scaled. To enable this, we also must be able to manufacture the swarm robot platforms at scale. This project explores the relationship between single-robot cost, total robots produced, and manufacturability of swarm platforms.

Robot Swarms to Mitigate Harmful Algal Blooms
Despite their potential, robot swarms have not been applied to tackle real-world problems. In continuing collaboration with the 3MDL lab, this project explores designing a swarm of robot boats to collect harmful algae from the water.
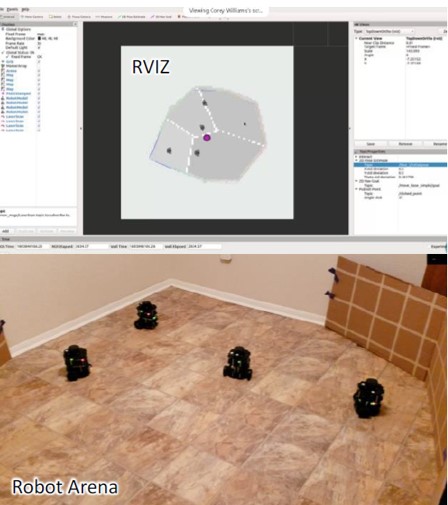
Turtlebot Partitioning

Turtlebot Collective Pulling

Turtlebot Bucket Brigade
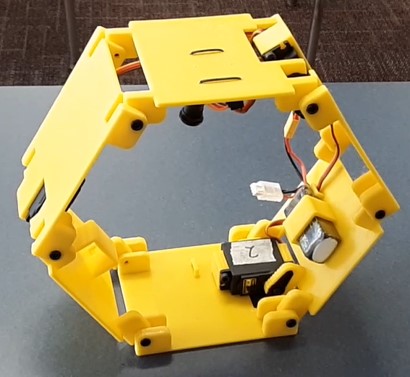
Folding Robot Locomotion

Offroad Turtlebot
Turtlebot with Conveyor

Turtlebot Machine Vision