

Spring 2019 Senior Design Projects
- Inmate Vital Signs Bracelet Monitor
- Wheelchair for Ice Fishing
- Historic Pratt & Whitney R4360 Aircraft Engine
- Plastic Film Disposal Appliance
- Hospital Head Restraint for Stroke Patients
- Soft Robotics grasper
- Design, Build and Testing of a 10ft door
- Compost Processing Study for Zero Waste Athletic Events
- Lexan Bender - This device won First place in the first annual College-wide design competition
- CASMART: Deployment and Orientation Mechanism for Small Satellites
 The project we were assigned was an inmate vital signs bracelet monitor. Our goal
was to be able to produce a bracelet monitor that is equipped with the ability to
track and record vitals and location, along with monitoring that feedback on a single
device. Although it is impossible to prevent these things from happening the idea
is to decrease response time when possibly fatal incidents occur so that there is
a greater chance of stopping them before it is too late. The plan was to create a
locking mechanism similar to that of a handcuff. The band itself will have to be made
out of very durable and strong material, while still being flexible and comfortable
enough to wear around the wrist.
The project we were assigned was an inmate vital signs bracelet monitor. Our goal
was to be able to produce a bracelet monitor that is equipped with the ability to
track and record vitals and location, along with monitoring that feedback on a single
device. Although it is impossible to prevent these things from happening the idea
is to decrease response time when possibly fatal incidents occur so that there is
a greater chance of stopping them before it is too late. The plan was to create a
locking mechanism similar to that of a handcuff. The band itself will have to be made
out of very durable and strong material, while still being flexible and comfortable
enough to wear around the wrist.
 Team Members: Henry Taplin, Kyle Johnson, Alex Archer, Evan Bartlett
Team Members: Henry Taplin, Kyle Johnson, Alex Archer, Evan Bartlett
Faculty Advisor: Robert Langenderfer; Client Advisor: Leon Fitzpatrick
Project Sponsor: Sovereign Solutions LLC
Special Thanks: John Jaegly, Nicholas Michael
 The objective of this project is to modify a mobility scooter so that it can be used
for various outdoor activities, mainly ice fishing. The scooter that was generously
donated by The Ability Center of Greater Toledo is the Rascal 130 model, which is
a three-wheeled mobility scooter with an electric seat lift. This scooter is being
modified to assist a local resident of Adrian, Michigan, Gloria Miller, who has recently
suffered a stroke and is unable to partake in the outdoor activities that she used
to. As a result, the scooter will be required to traverse harsh terrain including
ice, snow, and uneven surfaces. The client also had several requests as well including
a canopy for protection from the elements, a fishing pole holder, and cup holder to
make the scooter more user-friendly. During the initial dynamic field tests on the
ice at the Ottawa Park Ice Rink, the scooter’s start and stop ability was adequate,
but its maneuverability was not acceptable. The group determined that three large-diameter,
all weather tires would be the most practical solution that would align with our budget
of $500. The main priority for the project was then to modify the underbody of the
scooter to accommodate for the larger diameter tires. This includes the design, fabrication,
and testing of an adapter, new rear wheel hubs, and a modified front tire bracket.
The next priority was to order and assemble a canopy and cover for the scooter that
will adequately protect our client from the rain, snow, or harsh winds.
The objective of this project is to modify a mobility scooter so that it can be used
for various outdoor activities, mainly ice fishing. The scooter that was generously
donated by The Ability Center of Greater Toledo is the Rascal 130 model, which is
a three-wheeled mobility scooter with an electric seat lift. This scooter is being
modified to assist a local resident of Adrian, Michigan, Gloria Miller, who has recently
suffered a stroke and is unable to partake in the outdoor activities that she used
to. As a result, the scooter will be required to traverse harsh terrain including
ice, snow, and uneven surfaces. The client also had several requests as well including
a canopy for protection from the elements, a fishing pole holder, and cup holder to
make the scooter more user-friendly. During the initial dynamic field tests on the
ice at the Ottawa Park Ice Rink, the scooter’s start and stop ability was adequate,
but its maneuverability was not acceptable. The group determined that three large-diameter,
all weather tires would be the most practical solution that would align with our budget
of $500. The main priority for the project was then to modify the underbody of the
scooter to accommodate for the larger diameter tires. This includes the design, fabrication,
and testing of an adapter, new rear wheel hubs, and a modified front tire bracket.
The next priority was to order and assemble a canopy and cover for the scooter that
will adequately protect our client from the rain, snow, or harsh winds.
 Team Members: Josh Schott, Taylor Opp, Yajun Xu, Tsz Lung Liu
Team Members: Josh Schott, Taylor Opp, Yajun Xu, Tsz Lung Liu
Faculty Advisor: Mohamed Samir Hefzy; Client Advisor: Angie Goodnight
Project Sponsor: The Ability Center of Greater Toledo
Special Thanks: John Jaegly and the University of Toledo Machine Shop
 The Pratt & Whitney R-4360 “Wasp Major” has been an ongoing project in senior design,
with completed work spanning multiple semesters. The goal for this semester was to
continue restoration of the engine and complete design related tasks associated with
the project.
The Pratt & Whitney R-4360 “Wasp Major” has been an ongoing project in senior design,
with completed work spanning multiple semesters. The goal for this semester was to
continue restoration of the engine and complete design related tasks associated with
the project.
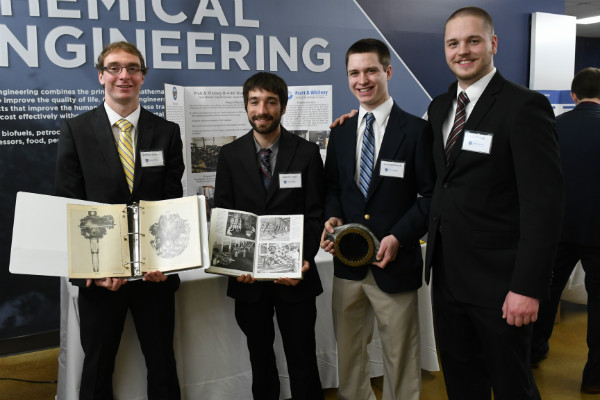
The Pratt & Whitney R-4360 Wasp Major was introduced and mass-produced in the mid-1940s to mid-1950s in the United States. This radial engine has 28 cylinders (4 rings of 7) and is the largest piston displacement engine to be mass produced in the US. The R-4360 which is currently being restored at the University of Toledo originally belonged to a C-119 Flying Boxcar at the New England Air Museum. In 1979, A tornado struck the museum and destroyed the aircraft along with others. In the early 1980s, Kevin Cameron acquired the engine and later donated it to Dr. Hixon at the University of Toledo. The engine has become a restoration project for multiple senior design groups. For this semester, our task was to lift the seven remaining cylinders in order to free the crankshaft of the engine. This process involves removing all the nuts surrounding the cylinder heads and lifting them with hydraulic fluid, one at a time. After successfully lifting every cylinder, we soon found out that there had been moisture trapped inside the engine. This moisture has lead to the formation of rust inside the cylinders and pistons themselves. Once the rust is removed, the cylinders are honed or replaced, and the main bearings are oiled, the crankshaft should be able to rotate freely.
Team Members: Christian Wilks- Group Leader; Sajjad Almatrood - Purchasing Agent; Spencer Wiechers - Communications Specialist; Stephen Fabec - Technical Liaison; Donald Eicher – Team Support Specialist
Faculty Advisor: Dr. Ray Hixon; Client Advisor: Dr. Ray Hixon
Sponsor: University of Toledo
 The objective of this project was to research, design, modify, test, and evaluate
improvements to an existing home appliance that recycles plastic film. Plastic film
waste is a large issue, with more than one-hundred thousand marine animals being killed
each year due to plastic film waste entering oceans and waterways. Almost all households
utilize the most common form of plastic film on a weekly basis: the plastic grocery
bag. The goal of this home appliance improvement was to reduce cycle time and improve
ergonomics. The device, “Puck-It,” was created by a previous senior design group
to meltdown and fuse plastic bags together. The device succeeded with fusing the
plastic bags into an easily recyclable puck, however, it had some obvious drawbacks.
The cycle time was slow, taking around an hour to make one plastic puck. Only two
bags could get melted down and fused into a puck, which leads to very low throughput
and efficiency. The handle and compacting apparatus were also awkward and not user-friendly.
The project goal was to increase the throughput of the device, reduce the cycle time,
and increase user-friendliness.
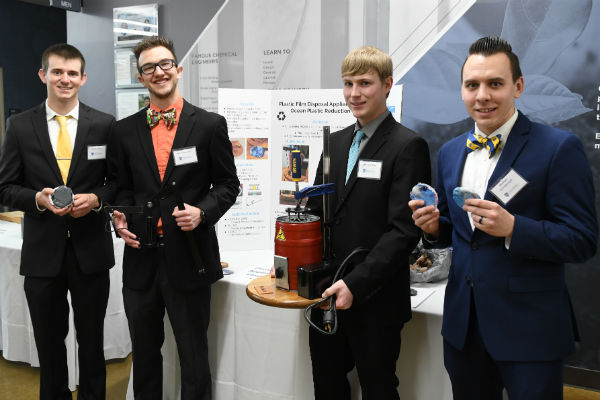
The objective of this project was to research, design, modify, test, and evaluate
improvements to an existing home appliance that recycles plastic film. Plastic film
waste is a large issue, with more than one-hundred thousand marine animals being killed
each year due to plastic film waste entering oceans and waterways. Almost all households
utilize the most common form of plastic film on a weekly basis: the plastic grocery
bag. The goal of this home appliance improvement was to reduce cycle time and improve
ergonomics. The device, “Puck-It,” was created by a previous senior design group
to meltdown and fuse plastic bags together. The device succeeded with fusing the
plastic bags into an easily recyclable puck, however, it had some obvious drawbacks.
The cycle time was slow, taking around an hour to make one plastic puck. Only two
bags could get melted down and fused into a puck, which leads to very low throughput
and efficiency. The handle and compacting apparatus were also awkward and not user-friendly.
The project goal was to increase the throughput of the device, reduce the cycle time,
and increase user-friendliness.
Team Members: Michael Davanaugh - Machine Shop Liaison; Michael Hillis - Purchasing Coordinator; McKinnon Kish - Communication Specialist; Hunter Niese - Group Leader
Faculty Advisor: Dr. Reza Rizvi; Client Advisor: Mr. Scott Steele
Project Sponsors: SWS Consulting, LLC; The University of Toledo: College of Engineering
 During surgery, stroke patients are brought into an operating room to quickly remove
a clot from their brain. During this procedure, the patient is awake as a scope is
inserted near the groin. Due to the nature of this surgery, the head must be restrained
to provide a clear x-ray picture. The Omega head restraint combines engineering functionality
with artistic design. With a slide-on design that fits Toledo hospital’s operating
table, the base piece of Omega is quick and easy to set up for nurses. It provides
a solid, U-shaped barrier that prevents side-to-side movement of the patient’s head,
and a soft cushioned base to keep the patient comfortable during the surgery. Padding
is also added around the patient’s head to provide a snug fit. A Velcro forehead strap
is added to prohibit vertical movement, and an optional chin strap may be utilized
in special cases to further prevent movement.
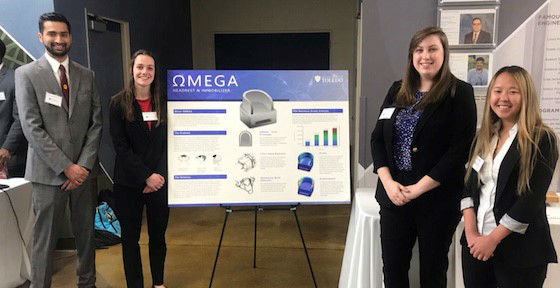
During surgery, stroke patients are brought into an operating room to quickly remove
a clot from their brain. During this procedure, the patient is awake as a scope is
inserted near the groin. Due to the nature of this surgery, the head must be restrained
to provide a clear x-ray picture. The Omega head restraint combines engineering functionality
with artistic design. With a slide-on design that fits Toledo hospital’s operating
table, the base piece of Omega is quick and easy to set up for nurses. It provides
a solid, U-shaped barrier that prevents side-to-side movement of the patient’s head,
and a soft cushioned base to keep the patient comfortable during the surgery. Padding
is also added around the patient’s head to provide a snug fit. A Velcro forehead strap
is added to prohibit vertical movement, and an optional chin strap may be utilized
in special cases to further prevent movement.
 Team Members: Margaret Buchele, Kristin Langlois, Alyan Memon, Natalie Oesch, Domenic Pennetta
(art student)
Team Members: Margaret Buchele, Kristin Langlois, Alyan Memon, Natalie Oesch, Domenic Pennetta
(art student)
Faculty Advisor: Dr. Mohammad Elahinia; Client Advisor: Dr. Syed Zaidi; Project Sponsor: Dr. Syed Zaidi
Special Thanks: Special thanks to UT’s College of Arts, Social Sciences and Education, Brian Carpenter and Eric Zeigler, and special thanks to The University of Toledo’s College of Engineering Dr. Brian Trease and Nicholas Michael
 Soft robotics is an area of robotics in which robotic actuators are made of soft,
compliant materials. Because of their high flexibility, soft robotic actuators can
replicate biological movements that are difficult for a typical robot to perform.
A proof-of-concept project was developed to test different 3D printable materials
that could possibly be used for soft robotics. To accomplish this, our team created
a functional, 3D printable pneumatic grasper design than compared the performances
of our design printed in different flexible materials. The results of the materials’
performances were tabulated in a matrix that offers insight into choosing the best
material and printer properties for the needs of future soft robotics applications.
Soft robotics is an area of robotics in which robotic actuators are made of soft,
compliant materials. Because of their high flexibility, soft robotic actuators can
replicate biological movements that are difficult for a typical robot to perform.
A proof-of-concept project was developed to test different 3D printable materials
that could possibly be used for soft robotics. To accomplish this, our team created
a functional, 3D printable pneumatic grasper design than compared the performances
of our design printed in different flexible materials. The results of the materials’
performances were tabulated in a matrix that offers insight into choosing the best
material and printer properties for the needs of future soft robotics applications.
 Team Members: Ali Attar, Joseph Treece, Brendan LaScola, Austin Williams
Team Members: Ali Attar, Joseph Treece, Brendan LaScola, Austin Williams
Faculty Advisor: Lauren Marshall; Client Advisor: Dr. Brian Trease
Project Sponsor: The University of Toledo
Special Thanks: Nick Michael
 Our team was tasked with designing, testing, and building a 10-foot door. More specifically,
we needed to determine what modifications needed to be made to the structural components
of a fiberglass door do ensure adequate performance if the door was increased to 10’
x 5’. This project was done in tandem with Therma – Tru, a locally headquartered company
that specializes in fiberglass doors. At this time Therma – Tru does not have the
capability to build or test a full-scale 10-foot door. We simulated a 10-foot door
by lowering the handle and lock on a standard door to approximately 8” above the bottom
of the door. Doing this simulated the length of stile above the lock that a 10 food
door would have.
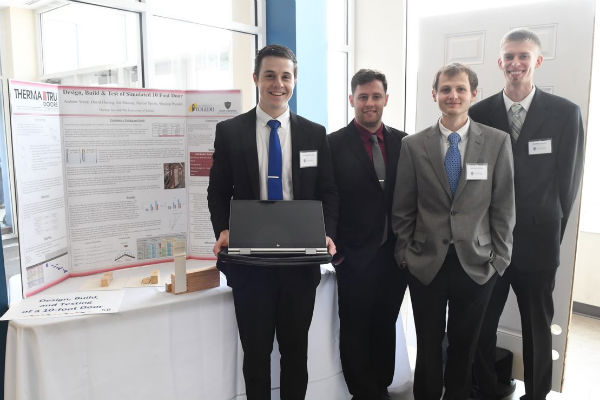
Our team was tasked with designing, testing, and building a 10-foot door. More specifically,
we needed to determine what modifications needed to be made to the structural components
of a fiberglass door do ensure adequate performance if the door was increased to 10’
x 5’. This project was done in tandem with Therma – Tru, a locally headquartered company
that specializes in fiberglass doors. At this time Therma – Tru does not have the
capability to build or test a full-scale 10-foot door. We simulated a 10-foot door
by lowering the handle and lock on a standard door to approximately 8” above the bottom
of the door. Doing this simulated the length of stile above the lock that a 10 food
door would have.
Five doors were built (3 standard doors, 2 modified doors) and were tested using differential pressure and the deflection in the top former of the door, above the lock, was measured. Using the data from these tests we were able to develop a relation equation that would allow Therma – Tru to set either the thickness or width of the structural rail and the equation would give them the minimum other dimension needed for adequate performance.
 Team Members: Joe Macsay – Team Leader, Nathan Spotts – Client Contact, David Herzog – Communication
Lead, Andrew Waite – Financial Lead, Sheldon Wendel – CADD / FEA Lead
Team Members: Joe Macsay – Team Leader, Nathan Spotts – Client Contact, David Herzog – Communication
Lead, Andrew Waite – Financial Lead, Sheldon Wendel – CADD / FEA Lead
Faculty Advisor: Dr. Sorin Cioc; Client Advisor: Bert Spellmen; Project Sponsor: Therma – Tru
Special thanks to the Big Fab Lab in Bowling Green, Ohio for allowing us to use their CNC machine for our doors.
 Our group was tasked with performing a research study on Savage Arena, and its current
waste streams and athletic processes, and designing a zero waste process that diverts
90% of this waste stream from the landfill. A variety of recommendations and improvements
can be made on the existing facility and processes as a result of our waste audits
of Savage Arena’s main concourse level, where a majority of the solid waste is produced
during events. Along with this research data, we were also tasked with providing a
range of alternative product options for UT to adopt zero waste processes. Through
these alternative options and existing facility recommendations, UT will be able to
perform a research study of their own on Savage Arena using our recommendations. What
is successful among these recommendations can be upscaled to other facilities on campus
and accelerate UT to become a zero solid waste campus.
Our group was tasked with performing a research study on Savage Arena, and its current
waste streams and athletic processes, and designing a zero waste process that diverts
90% of this waste stream from the landfill. A variety of recommendations and improvements
can be made on the existing facility and processes as a result of our waste audits
of Savage Arena’s main concourse level, where a majority of the solid waste is produced
during events. Along with this research data, we were also tasked with providing a
range of alternative product options for UT to adopt zero waste processes. Through
these alternative options and existing facility recommendations, UT will be able to
perform a research study of their own on Savage Arena using our recommendations. What
is successful among these recommendations can be upscaled to other facilities on campus
and accelerate UT to become a zero solid waste campus.
 Team Members: Isaac Shaw, Ryan Runion, Diego Sierra, Mohammed Almutairi
Team Members: Isaac Shaw, Ryan Runion, Diego Sierra, Mohammed Almutairi
Faculty Advisor: Salma Shaik; Client Advisor: Mike Green
Special Thanks: Thank you to Michael Green and his sustainability team - Olalekan Olanusi, Jennell Brown, and Sakib Pathan - for their help and support throughout this project. Thank you to Dr. Franchetti for his resources and knowledge in sustainability and waste minimization processes. Additional thanks to our advisor Salma Shaik, without whom this report would not be possible.
Thank you to the following people for their help and collaboration: Dr. Matthew Franchetti, PE, Associate Dean of Undergraduate Studies; Matt Rader, Mechanical Engineering Student, Rocket Recycling; Adam Simpson, UT Athletics; Chris Barnhardt, Manager of UT Athletic Events; Grayson Hart, GoZero Food Waste Reductions Coordinator; Anya Dale, Sustainability Program Manager, University of Michigan
 Motion Controls Robotics Inc. is a custom robotic system builder who provides robotic
solutions all over the world. Due to their diverse product line, MCRI regularly needs
to produce unique guarding for each of their systems. To accomplish this, MCRI uses
Lexan, a clear polycarbonate (similar to plexiglass) due to its high strength. It
is very common for MCRI to need to apply bends to the Lexan in order to provide optimal
guarding for their systems. MCRI’s current method for bending Lexan is not efficient,
operator friendly or safe and takes more time than they would like it to.
Motion Controls Robotics Inc. is a custom robotic system builder who provides robotic
solutions all over the world. Due to their diverse product line, MCRI regularly needs
to produce unique guarding for each of their systems. To accomplish this, MCRI uses
Lexan, a clear polycarbonate (similar to plexiglass) due to its high strength. It
is very common for MCRI to need to apply bends to the Lexan in order to provide optimal
guarding for their systems. MCRI’s current method for bending Lexan is not efficient,
operator friendly or safe and takes more time than they would like it to.
This is where our team comes in. Our goal was to create a mobile workstation that was safe, and operator friendly. Our system had to and does provide a better-quality bend than the current method and in a fraction of the time. The Lexan Bending Workstation heats the material in a covered heater from both the top and the bottom, allowing for even heating. Then the material is moved out of the heater, to the bender where it is pinned by a rotary clamp. After clamping the bending arm is raised and performs a sharp corner bend of high quality. All of this can be done by a single operator. As of 5/1/2019, the Lexan Bending Workstation has been delivered and integrated into MCRI’s production system. After demonstrations and operator tutorials MCRI has stressed that they are very pleased with the outcome of this project and are looking to work with the University of Toledo in the future.
 Team Members: Nathan Baker, Jacob Schneider, Kolin Connors, Chris Elliot
Team Members: Nathan Baker, Jacob Schneider, Kolin Connors, Chris Elliot
Faculty Advisor: Dr. Adam Schroeder; Client Advisor: Andy Horn
Project Sponsor: Motion Controls Robotics
Special Thanks: Neff Automation, 80/20 Inc., University of Toledo Machine Shop The goal of this student challenge is to employ shape memory alloys in the design
and demonstration of a deployment and orientation mechanism for a 3U CubeSat (10x10x30cm
microsatellite). The deployment mechanism will be used to deploy one or more solar
panels, while the orientation mechanism will be used to orient the panels to maximize
power collection. The deployment mechanism will be an active system (feedback controlled),
while the orientation mechanism will be a passive system. Both designs require the
use of shape memory alloys in order to satisfy the weight and volume specifications.
This project is part of an international collegiate competition hosted by academic,
government and industrial members of the Consortium for the Advancement of Shape Memory
Alloy Research and Technology (CASMART).
The goal of this student challenge is to employ shape memory alloys in the design
and demonstration of a deployment and orientation mechanism for a 3U CubeSat (10x10x30cm
microsatellite). The deployment mechanism will be used to deploy one or more solar
panels, while the orientation mechanism will be used to orient the panels to maximize
power collection. The deployment mechanism will be an active system (feedback controlled),
while the orientation mechanism will be a passive system. Both designs require the
use of shape memory alloys in order to satisfy the weight and volume specifications.
This project is part of an international collegiate competition hosted by academic,
government and industrial members of the Consortium for the Advancement of Shape Memory
Alloy Research and Technology (CASMART).
 Team Members: Andrew Loch, Derek Messer, Alberto Satine, William Frey, Corey Williams
Team Members: Andrew Loch, Derek Messer, Alberto Satine, William Frey, Corey Williams
Faculty Advisor: Dr. Brian Trease; Client Advisor: Dr. Othmane Benafan
Project Sponsor: Consortium For the Advancement of Shape Memory Alloy Research and Technology (CASMART)
Special Thanks: NASA, Fort Wayne Metals